
"PROGETTO COMENIUS"": le altre macchine volanti - 7/7
a cura del prof. Massimo Bevilacqua
Al progetto Comenius hanno partecipato quattro scuole. Tre scuole hanno prodotto delle macchine volanti in modi e con finalità diverse. Diciamocelo subito: il progetto ruotava intorno alla matematica e la realizzazione di un dirigibile fatto in casa non era alla portata delle scuole coinvolte, fatta eccezione per la nostra che almeno per il nome di "Istituto Aeronautico" aveva un onore da difendere. Quindi quanto realizzato è eccezionale in se. La scuola belga (a destra) presenta una macchina con pallone preconfezionato in Mylar acquistato in America. Il punto di forza del progetto è il software che hanno sviluppato per il controllo della motorizzazione e della posizione. La scuola ceca (al centro) presenta la realizzazione personale di un ragazzo con padre aeromodellista. Un pallone artigianale realizzato con le buste della spazzatura leggere ed un sistema di controllo realizzato con mini ventole da computer. La scuola italiana (a sinistra) presenta il Nightmare airship, oggetto di questa storia. Dettagli e performaces per il dirigibile della scuola belga: di fronte alle nostre stesse difficoltà di reperimento dei materiali, gli insegnanti hanno ripiegato sull'acquisto in America di un involucro di ricambio commerciale. Hanno così permesso ai ragazzi di concentrarsi maggiormente su quanto interessava il loro indirizzo di studi.  I ragazzi hanno realizzato una essenziale navicella installadovi tre motori, relative eliche e circuiti di controllo. Due eliche laterali per il controllo della direzione ed una disposta verticalmente sotto la base della navicella, per il controllo della quota. Nessuna superfice stabilizzante sul pallone.  Il controllo elettronico dei motori è stato interfacciato con un IPad in modo che al movimento fisico dello schermo corrispondesse l'accensione differenziale dei motori: inclinando l'IPad in avanti si alimentavano entrambi i motori laterali, incinandolo lateralmente funzionava un solo motore per impostare una imbardata e così via. L'inesperienza aeromodellistica e con il volo elettrico ha però giocato un brutto scherzo: più volte hanno sostituito i motori senza comprendere che le eliche erano sproporzionate. La macchina, controllata dall'IPad era sostanzialmente in grado di muoversi solo in cerchio perché funzionava correttamente un solo motore e mancava qualsiasi superficie aerodinamica di stabilità. Così quando i motori erano spenti, il pallone andava liberamente in deriva (anche ruotando intorno all'asse verticale) seguendo l'ultimo impulso ricevuto. Nei fatti nessun controllo della quota era possibile, così come il controllo di direzione. In questo caso serviva più tempo ed esperienza per completare il lavoro.
Il controllo elettronico dei motori è stato interfacciato con un IPad in modo che al movimento fisico dello schermo corrispondesse l'accensione differenziale dei motori: inclinando l'IPad in avanti si alimentavano entrambi i motori laterali, incinandolo lateralmente funzionava un solo motore per impostare una imbardata e così via. L'inesperienza aeromodellistica e con il volo elettrico ha però giocato un brutto scherzo: più volte hanno sostituito i motori senza comprendere che le eliche erano sproporzionate. La macchina, controllata dall'IPad era sostanzialmente in grado di muoversi solo in cerchio perché funzionava correttamente un solo motore e mancava qualsiasi superficie aerodinamica di stabilità. Così quando i motori erano spenti, il pallone andava liberamente in deriva (anche ruotando intorno all'asse verticale) seguendo l'ultimo impulso ricevuto. Nei fatti nessun controllo della quota era possibile, così come il controllo di direzione. In questo caso serviva più tempo ed esperienza per completare il lavoro.Idea buona ma motopropulsione sbagliata. |
| Dettagli e performaces per il dirigibile del ragazzo ceco: secondo me questa era una piccola un'opera d'arte ! Ingegnoso, affascinante ed elegante, mi piaceva più del nostro perché realizzato in modo minimale. Evidentemente opera di un esperto aeromodellista, aveva il pallone realizzato in plastica molto leggera (buste della spazzarura in plastica ecologica )saldata a caldo. Una genialata.  Tre ventoline di raffreddamento per processori realizzavano il controllo sui tre assi. Due ventoline anteriori erano montate a sbalzo su un asse solidale ad un servocomando con rotazione di 180° dall'alto in basso. Queste ventole provvedevano all'avanzamento ed al controllo della quota. La terza ventola in coda, anch'essa poteva ruotare di 180° ottenendo così l'imbardata. Il ragazzo controllava il galleggiamento neutro vaporizzando di frequente acqua sulla superficie del pallone. 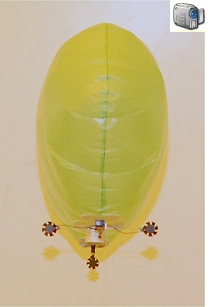 L'alimentazione era con tre piccolissime celle LiPo (dimensioni 2+3 cm di cui non conosco i mA) alloggiate con la ricevente nella navicella centrale in cartoncino bianco disegnato.
L'alimentazione era con tre piccolissime celle LiPo (dimensioni 2+3 cm di cui non conosco i mA) alloggiate con la ricevente nella navicella centrale in cartoncino bianco disegnato.Aveva evidentemente una scarsa autonomia di carica ma proporzionata al mezzo. Il controllo non era particolarmente reattivo ed il giovane non si è azzardato a fare più di due metri di quota ma a me piaceva moltissimo. Avendo il controllo di quota con le ventole anteriori, ogni volta che ruotava le ventole per salire o scendere, si generava un momento che innescava un fastidioso ed evidente beccheggio. Il becceggio non si smorzava con facilità e la mancanza di piani di coda, non migliorava la situazione. La direzione e la stabilità erano completamente affidate ai comandi tempestivi ed anticipati del pilota ed in qualche misura alla forma appiattita del pallone. Onore al pilota e al costruttore quindi ! |