
Dirigibile "COMENIUS": Il progetto e l'esperienza - 1/7
a cura del prof. Fabrizio Batocchi & Massimo Bevilacqua
 Nell'ambito del progetto Comenius: "From Leonardo da Vinci to the olympics 2012" ci siamo trovati a dover realizzare un piccolo dirigibile per veicolare alcuni dei contenuti del progetto quali l'utilizzo della matematica, i sistemi GPS, l'utilizzo dell'energia solare etc.
Nell'ambito del progetto Comenius: "From Leonardo da Vinci to the olympics 2012" ci siamo trovati a dover realizzare un piccolo dirigibile per veicolare alcuni dei contenuti del progetto quali l'utilizzo della matematica, i sistemi GPS, l'utilizzo dell'energia solare etc. Con l'utilizzo delle strutture e dei materiali messi a disposizione dal corso ARCA, nell' Istituto "F.De Pinedo" si é realizzato un modello di dirigibile completamente autocostruito. Ecco la descrizione generale del progetto a cura del prof. Batocchi. |
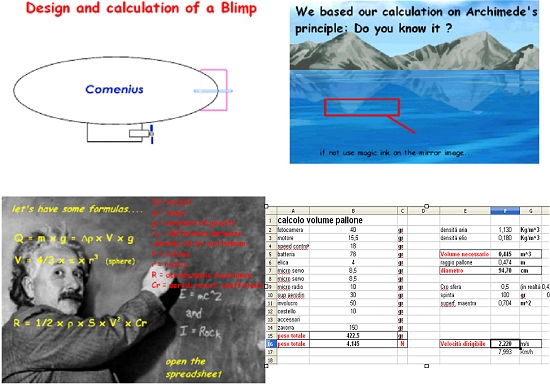
| Siamo partiti da un calcolo di prima approssimazione, facendo riferimento inizialmente ad un pallone sferico per valutare pesi ed ingombri di massima. Abbiamo utilizzando un foglio elettronico per fare i primi conti così da poter effettuare con rapidità variazioni su dimensioni o numero di dispositivi a bordo del dirigibile, vedendo immediatamente l'effetto in termini di peso o di volume necessario per sostenere il peso raggiunto. In basso vedete alcune schermate prese da una nostra presentazione fatta con il programma Activeinspire della Promethean, in inglese, lingua ufficiale dello scambio del Comenius. L'ultima immagine è relativa al foglio elettronico che contiene i calcoli di massima per definire pesi, ingombri e velocità stimate del velivolo avendo testato la trazione dell'elica su un banco dinamometrico autocostruito. Fatti questi primi calcoli siamo passati a realizzare dei prototipi per verificare, costruendo e rinforzando opportunamente la struttura, quali fossero i pesi effettivi dell'involucro. |
 |
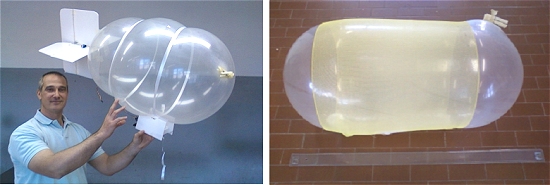
| I primi tentativi sono stati addirittura grossolani, come potete osservare sotto, ma sono serviti per maturare meglio l'idea di come sarebbe dovuto diventare il nostro dirigibile. Dopo aver tentato di usare un involucro con attaccati i piani di coda, abbiamo capito che la struttura doveva essere semirigida o rigida ed abbiamo sperimentato, contemporaneamente le due differenti soluzioni; |
 |
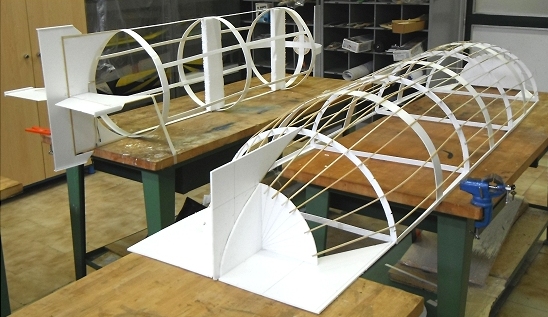
| in basso potete vedere la struttura rigida costituita da correntini di balsa ed ordinate in poliplat in grado di contenere tre palloni in pvc del diametro di circa 70 cm ciascuno ed in basso il paragone immediato con la struttura semirigida costituita da fasce di depron che contengono un pallone sagomato a forma di cilindro. |
 |
| Dopo diversi tentativi ci siamo dovuti orientare sull'ultimo tipo di struttura, modificandola per alleggerire il tutto, e allungandola per contenere quattro palloni.
Nonostante i calcoli dimostrassero che quattro sfere erano sufficienti, é stato necessario sfruttare gli spazi vuoti tra le sfere. Dei profilattici sono serviti allo scopo, e con l'utilizzo di sette di questi dispositivi è stato possibile raggiungere il successo dell'impresa. |
 |
Un cenno al controllo del velivolo: si è optato fin dall'inizio per una struttura convenzionale con piani di coda posteriori, efficace quindi solo in presenza di velocità traslazionale;
 la scelta si è resa necessaria sia per contenere i costi dei materiali e dei servocomandi e per raggiungere la massima semplicità di realizzazione.
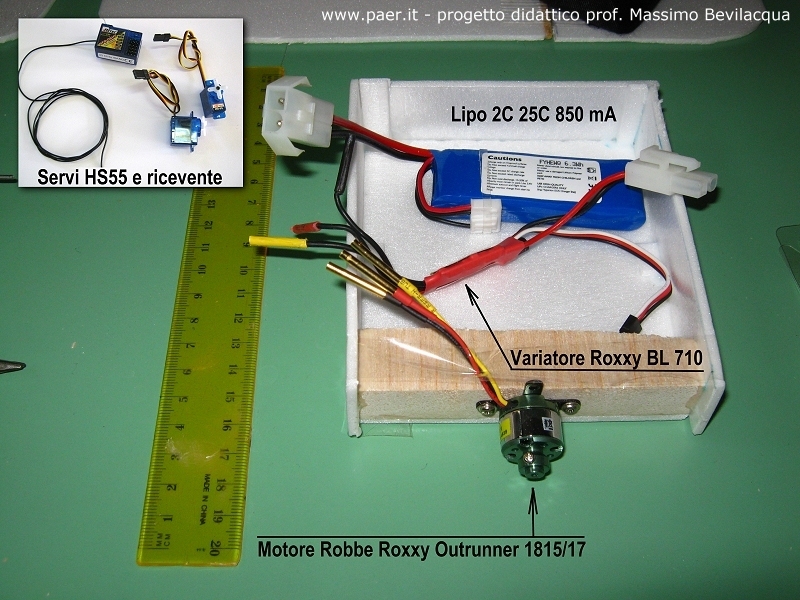
la scelta si è resa necessaria sia per contenere i costi dei materiali e dei servocomandi e per raggiungere la massima semplicità di realizzazione.Il motore é il brushless Robbe Roxxy Outrunner 1815/17 con il relativo variatore 710 da 10A, accoppiato ad una elichetta 5,5x4,5 e alimentato con una LiPo 2C, 25C da 450 o 850 mA. Il sistema può fornire anche 200 gr di trazione. Due servocomandi HS55 per i piani di coda e una microricevente completano l'elettronica di comando. |
Ecco una immagine della macchina realizzata da noi e dagli altri partecipanti europei
|